CONTENTS
- OPINION - バックグラウンドからフォアフロントへ:細胞生死と生体恒常性に関わるセンサーチャネル (後編その2) (岡田泰伸) P.167~
- SCIENCE TOPICS - ATP 受容体チャネルP2X2 三量体の活性化時の活性化シグナルの分子内の流れ (Batu Keceli・久保義弘) P.171~
- SCIENCE TOPICS - 電位依存性ホスファターゼVSP の酵素活性は電位センサーの動いた大きさに従って段階的に発揮される (坂田宗平・岡村康司) P.171~
- SCIENCE TOPICS - KCNQ1/KCNE1 チャネルを開きにくくしている分子メカニズム (中條浩一・久保義弘) P.171~
- PROFILE - 等 誠司 P.174~
- EDUCATION - 医療者教育における生理学と学生評価 (田川まさみ) P.175~
- EDUCATION - 生理学教育の質の担保 (松尾 理) P.179~
- AFTERNOON TEA - 堀尾奈央 「食と運動と健康」 P.182~
- AFTERNOON TEA - 向井秀夫 「辺縁から」 P.182~
- CALENDAR - 主な研究集会日程 P.185~
- 特集/SYMPOSIA - STIM/Orai による生体機能調節(S04) P.188~
- 特集/SYMPOSIA - 心理と生理をつなぐ神経基盤(S18) P.188~
- SYMPOSIA (Pt.2) - STIM/Orai による生体機能調節(S04)
- SYMPOSIA (Pt.2) - 興奮性細胞におけるオルガネラ特異的なCa2+ シグナリングと生体応答(S34)
- SYMPOSIA (Pt.2) - 調節因子としてのATP:膜蛋白質との相互作用を介して制御される新たな生体機能(S43)
- RECORDS - 平成26 年度 第1 回日本生理学会 次期理事長候補者 推薦委員会 議事録 P.193~
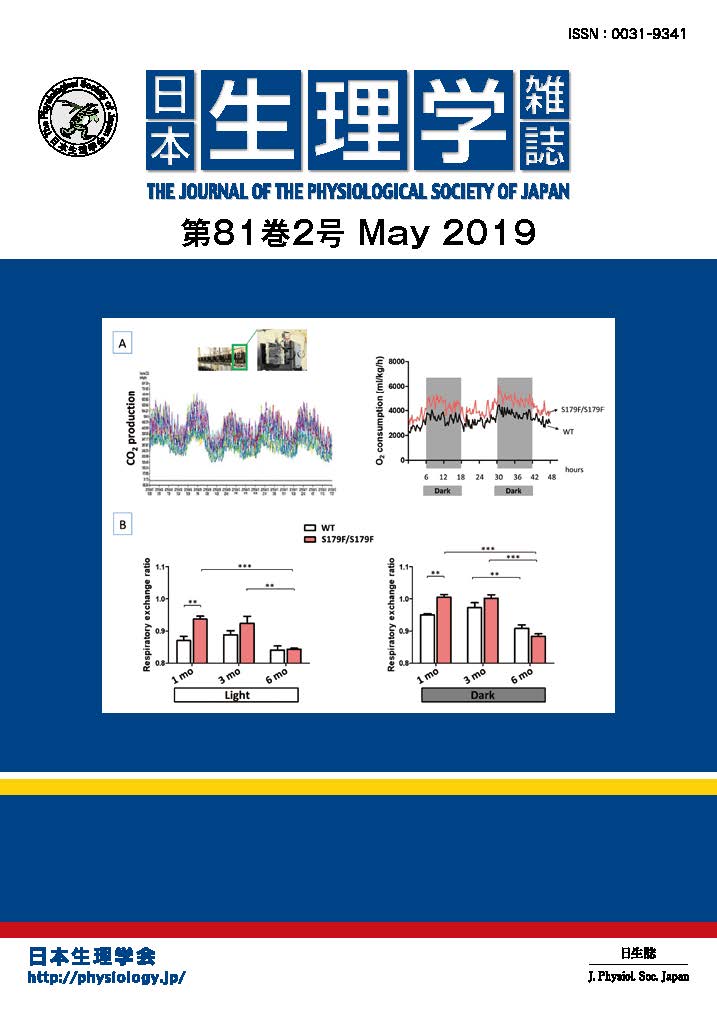
表紙の説明
第91 回日本生理学会大会
演題番号:2P-117
演題名:歩行時におけるクモヒトデの腕の役割分担とその内部機構についての考察
Arm preference of ophiuroids during locomotion and its implication for the internal controlscheme of arm usage
演者:松坂義哉1,佐藤英毅2,加納剛史2,坂本一寛2,青沼仁志3,石黒章夫2
所属:1東北大学大学院医学系研究科,2東北大学電気通信研究所,3北海道大学生命科学研究科
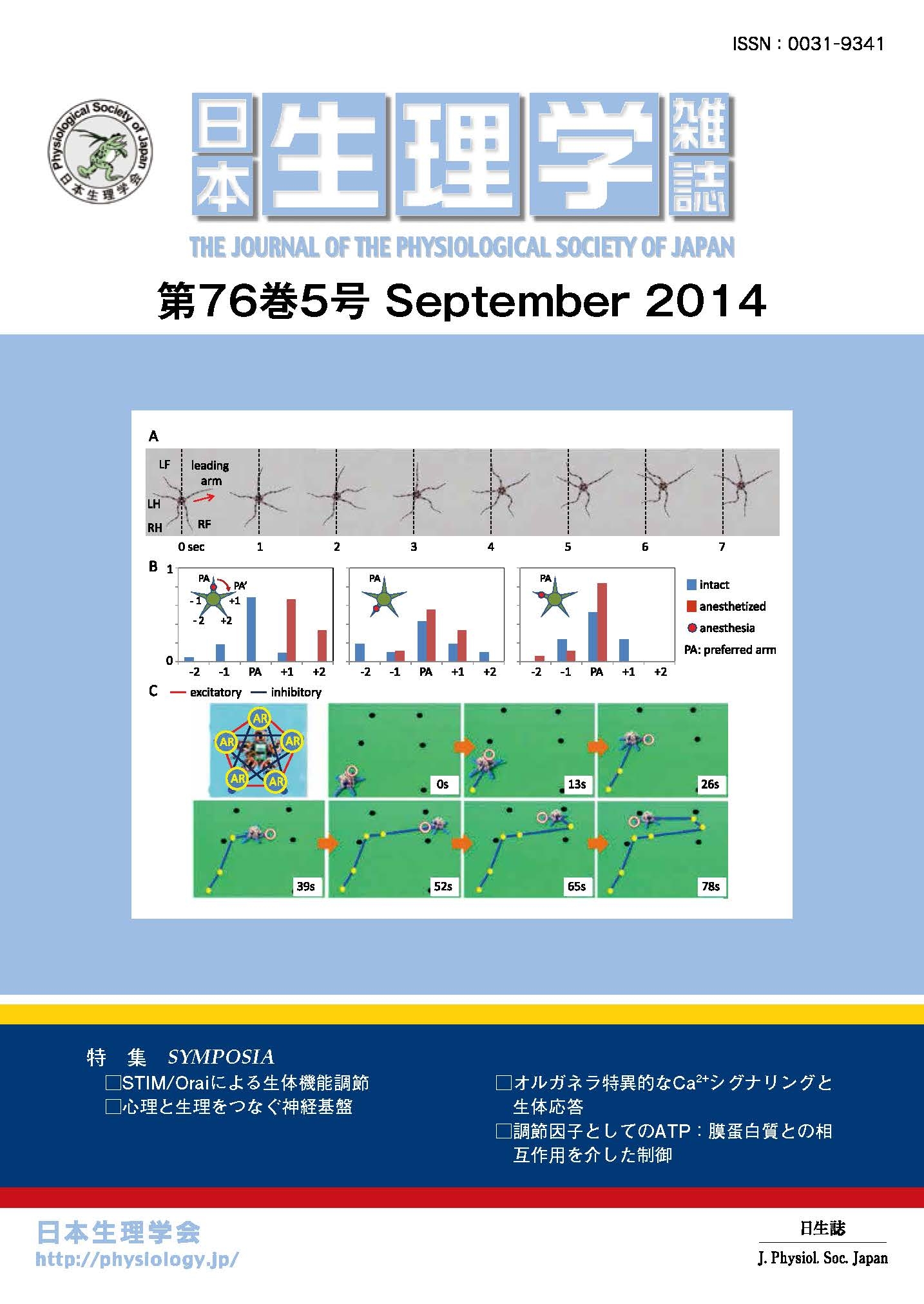
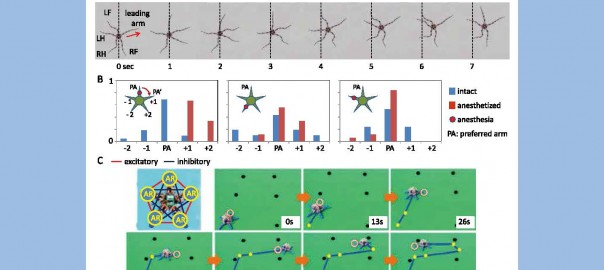
棘皮動物の一種,クモヒトデは5 本の多関節腕のリズミックな協調運動によって歩行する.しかし,クモヒトデには前後を決定する構造は無く,又5 本の腕を一元的に制御する中枢神経系も無い.このような身体構造を持つ生物が,如何にして進行方向を決定し,それに伴って各腕の役割を決定し,決定した方向に進むために各腕の運動を協調させているのかは生物学的にも制御工学的にも興味深い問題である.本研究では,クモヒトデの歩行運動の中で最も頻繁に見られるrowing と呼ばれる歩行パターンについて,腕の役割決定の仕組みを調べ,その制御則と自律分散システムによるロボットの制御とを比較検討した.
A) クモヒトデのrowing の連続写真.各コマの下の数値は経過時間.点線は歩行開始時の盤の位置.進行方向(矢印)に一腕(leading arm)を伸ばし,その両側の腕をオールのように動かして進む.LF,RF:left & right forelimbs,LH,RH:left & right hindlimbs.
B) Rowing において各腕がleading arm として使われた頻度の分布.青:無麻酔時,赤:一腕麻酔後.preferred arm(最も頻繁にleading arm になる腕)を麻酔すると,その隣の腕がpreferred arm になるように腕の役割分担が入れ替わる(左).一方,forelimb やhindlimb を麻酔した時には,腕の役割分担は不変(中,右).よって腕の役割決定においてはleading arm を優先的に決定し,他の腕の役割はそれに付随して決定すると考えられる.
C) 左上:クモヒトデ型ロボット(Kano et al Bioinspir. Biomim. 7:034001, 2012).
このロボットは全ての腕を統一的に制御する中枢コントローラーを持たず,各腕のコントローラーの相互作用によって腕の役割分担の決定や協調運動を行う(自律分散制御).
各腕のコントローラーはactive rotator と呼ばれる制御則に従い,その振る舞いは,その腕に対する誘因刺激の有無,他の腕からの神経性入力の総和,及び地面との接触情報によって決まる.AR:active rotator,赤:興奮性結合,青:抑制性結合.
0s―1 腕に誘因刺激(黄色い円)を与えると,その腕がleading arm になり,他の腕の役割はそれに付随して自動的に決定する.26s,65s―誘因刺激を与える腕を変える度に腕の役割分担が変わり,刺激の方向に向かって進む.
本ロボットは1)leading arm が決まると他の腕の役割も自動的に決まる,2)中枢性制御によらずに各腕の役割分担や協調が可能,3)各腕の役割は交換可能,と実際の生物と同等の性質を持ち,自律分散制御によって生物・ロボット共に柔軟で適応性の高い制御が可能な事を示した.
利益相反の有無:無し